Created: July 14, 2023 1:05 PM
Created by: Luser
Type: AI、Jetson nano
串口使用
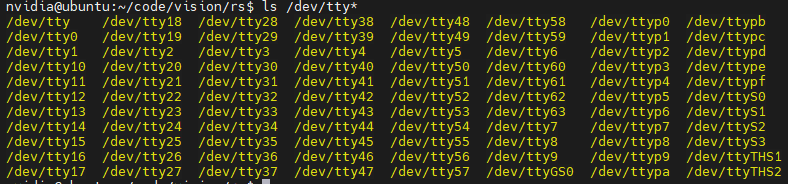
查看串口设备:
ls /dev/tty*
/dev/tty /dev/tty18 /dev/tty28 /dev/tty38 /dev/tty48 /dev/tty58 /dev/ttyp0 /dev/ttypb
/dev/tty0 /dev/tty19 /dev/tty29 /dev/tty39 /dev/tty49 /dev/tty59 /dev/ttyp1 /dev/ttypc
/dev/tty1 /dev/tty2 /dev/tty3 /dev/tty4 /dev/tty5 /dev/tty6 /dev/ttyp2 /dev/ttypd
/dev/tty10 /dev/tty20 /dev/tty30 /dev/tty40 /dev/tty50 /dev/tty60 /dev/ttyp3 /dev/ttype
/dev/tty11 /dev/tty21 /dev/tty31 /dev/tty41 /dev/tty51 /dev/tty61 /dev/ttyp4 /dev/ttypf
/dev/tty12 /dev/tty22 /dev/tty32 /dev/tty42 /dev/tty52 /dev/tty62 /dev/ttyp5 /dev/ttyS0
/dev/tty13 /dev/tty23 /dev/tty33 /dev/tty43 /dev/tty53 /dev/tty63 /dev/ttyp6 /dev/ttyS1
/dev/tty14 /dev/tty24 /dev/tty34 /dev/tty44 /dev/tty54 /dev/tty7 /dev/ttyp7 /dev/ttyS2
/dev/tty15 /dev/tty25 /dev/tty35 /dev/tty45 /dev/tty55 /dev/tty8 /dev/ttyp8 /dev/ttyS3
/dev/tty16 /dev/tty26 /dev/tty36 /dev/tty46 /dev/tty56 /dev/tty9 /dev/ttyp9 /dev/ttyTHS1
/dev/tty17 /dev/tty27 /dev/tty37 /dev/tty47 /dev/tty57 /dev/ttyGS0 /dev/ttypa /dev/ttyTHS2
Jetson nano的GPIO口与树莓派的GPIO口相兼容,可在下图查看Jetsonnano的GPIO引脚定义:
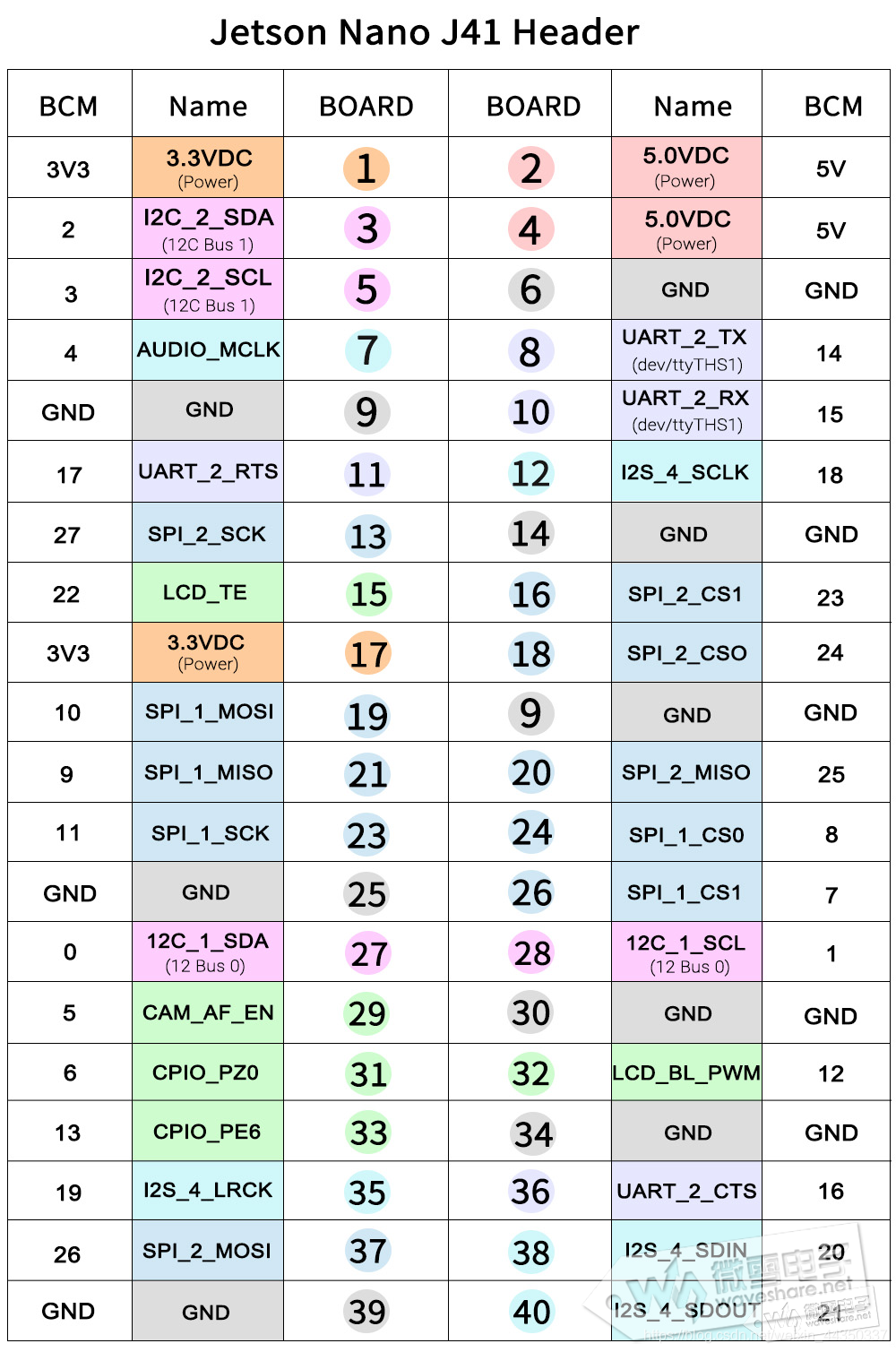
所以可以使用串口设备/dev/ttyTHS1进行GPIO的串口数据传输。
不同于树莓派中使用的串口库serial,Jetson nano 中的串口使用需要下载串口库pyserial:
pip3 install pyserial
使用:
import serial
ser = serial.Serial("/dev/ttyTHS1", 115200, timeout=1) # 串口设置
T265初始化
# 声明 RealSense 管道,封装实际设备和传感器
pipe = rs.pipeline()
# 构建配置对象并请求姿势数据
cfg = rs.config()
cfg.enable_stream(rs.stream.pose)
# 使用请求的配置开始流式传输
pipe.start(cfg)
T265 pose数据获取并串口输出
俯仰角(pitch)、横滚角(roll)和偏航角(yaw)概念:
T265可直接获取设备四元数信息,官方例程使用四元数的方式进行姿态角度计算
四元数的基本概念:
四元数是一种数学工具,用于表示旋转的方向和角度。与欧拉角不同,四元数可以避免万向锁问题,并且计算效率更高。
一个四元数由实部(也称为标量部分)和虚部(也称为矢量部分)组成。标量部分是一个实数,而矢量部分是一个三维向量。四元数可以表示为:
其中,w是实部,x、y和z是矢量部分的三个分量,i、j和k是虚部的三个基本单位向量。四元数的长度可以使用欧几里得范数计算:
四元数可以用来表示旋转的方向和角度,其中旋转角度θ和旋转轴(x, y, z)可以由四元数的虚部推导出来。具体地说,旋转轴和旋转角度可以使用以下公式计算:
其中acos是反余弦函数。通过这些公式,可以从四元数中提取旋转的方向和角度,并将其转换为欧拉角或其他旋转表示形式。
俯仰角(pitch)、横滚角(roll)和偏航角(yaw)计算公式:
可以使用四元数来计算旋转的俯仰角、横滚角和偏航角。使用四元数表示旋转时,可以使用以下公式将四元数转换为欧拉角形式:
其中,qx、qy、qz和qw分别是四元数的虚部和实部,atan2是反正切函数,asin是反正弦函数。这些公式可以将四元数表示的旋转转换为欧拉角形式,其中pitch表示绕y轴旋转的俯仰角,roll表示绕x轴旋转的横滚角,yaw表示绕z轴旋转的偏航角。
将T265获取到的四元数数据带入计算公式中即可获得俯仰角、横滚角和偏航角
参考官方例程的代码:
data = pose.get_pose_data()
w = data.rotation.w
x = -data.rotation.z
y = data.rotation.x
z = -data.rotation.y
pitch = -m.asin(2.0 * (x*z - w*y)) * 180.0 / m.pi;
roll = m.atan2(2.0 * (w*x + y*z), w*w - x*x - y*y + z*z) * 180.0 / m.pi;
yaw = m.atan2(2.0 * (w*z + x*y), w*w + x*x - y*y - z*z) * 180.0 / m.pi;
添加串口传输与位置信息后的完整代码:
import pyrealsense2 as rs
import math as m
import serial
import time
#取整数的补码
def int2hex(data):
if(data>0):
return data
else :
data=-data
data=data|0x8000
return data
while (True):
ser = serial.Serial("/dev/ttyTHS1", 115200, timeout=1) # 串口设置
# 声明 RealSense 管道,封装实际设备和传感器
pipe = rs.pipeline()
# 构建配置对象并请求姿势数据
cfg = rs.config()
cfg.enable_stream(rs.stream.pose)
# 使用请求的配置开始流式传输
pipe.start(cfg)
try:
while (True):
# 等待相机发出的下一组帧
frames = pipe.wait_for_frames()
# 获取姿势框架
pose = frames.get_pose_frame()
if pose:
# jetson nano t265角度传输
data = pose.get_pose_data()
# 位姿四元数的欧拉角
## 通过T265直接获取四元数
w = data.rotation.w
x = -data.rotation.z
y = data.rotation.x
z = -data.rotation.y
## 使用四元数公式计算三种欧拉角
pitch = -m.asin(2.0 * (x*z - w*y)) * 180.0 / m.pi
roll = m.atan2(2.0 * (w*x + y*z), w*w - x*x - y*y + z*z) * 180.0 / m.pi
yaw = m.atan2(2.0 * (w*z + x*y), w*w + x*x - y*y - z*z) * 180.0 / m.pi
# 转换为十六进制数并使用 bytearray 将数据打包成需要传输的格式。
pi = int2hex(int(pitch))
ro = int2hex(int(roll))
ya = int2hex(int(yaw))
my_data1 = bytearray([0xaa,0x29,0x05,0x35,0x06,pi>>8,pi&0xff,ro>>8,ro&0xff,ya>>8,ya&0xff,0x00])
ser.write(my_data1) # 串口传输
hh = int2hex(-10)
print("------------hh:",hh)
print("Frame #{}".format(pose.frame_number))
print("RPY [deg]: Roll: {0:.7f}, Pitch: {1:.7f}, Yaw: {2:.7f}".format(roll, pitch, yaw))
# 使用相机的位置信息,将位置信息转化为十六进制数据,并将数据打包成需要传输的格式。
#xyz
my_x = data.translation.x*10000
my_y = data.translation.y*10000
my_z = data.translation.z*10000
my_x = int2hex(int(my_x))
my_y = int2hex(int(my_y))
my_z = int2hex(int(my_z))
my_data2 = bytearray([0xaa,0x29,0x05,0x34,0x06,my_x>>8,my_x&0xff,my_y>>8,my_y&0xff,my_z>>8,my_z&0xff,0x00])
ser.write(my_data2) # 串口传输
print("pos:{}".format(data.translation))
time.sleep(0.1) #调试时使用,方便观察
finally:
pipe.stop()